|
| | Calibrated_camera (double near=10, double far=10000) |
| |
| | Calibrated_camera (const Matrix &camera_matrix, Calibration_descriptor cal, double near=10, double far=10000) |
| |
| | Calibrated_camera (const Self &other) |
| |
| virtual Self * | clone () const |
| |
| virtual Self & | operator= (const Self &other) |
| |
| void | initialize (const Matrix &intrinsic, Matrix rotation, Vector translation) |
| |
| void | set_orientation (const Quaternion &orientation) |
| | Alias of set_angles_from_quaternion() More...
|
| |
| const Quaternion & | get_orientation () const |
| |
| | Perspective_camera (double inear=10, double ifar=10000) |
| |
| | Perspective_camera (double icentre_x, double icentre_y, double icentre_z, double ipitch, double iyaw, double iroll, double ifocal_length, double iprincipal_point_x, double iprincipal_point_y, double iskew, double iaspect_ratio, double world_scale=1.0, double inear=10, double ifar=10000) |
| |
| | Perspective_camera (const kjb::Vector &icamera_centre, double ipitch, double iyaw, double iroll, double ifocal_length, double iprincipal_point_x, double iprincipal_point_y, double iskew, double iaspect_ratio, double world_scale=1.0, double inear=10, double ifar=10000) |
| |
| | Perspective_camera (const char *fname) |
| | Reads a camera from an input file. More...
|
| |
| | Perspective_camera (std::istream &in) |
| | Reads a camera from an input stream. More...
|
| |
| | Perspective_camera (const Perspective_camera &pc) |
| |
| virtual Perspective_camera & | operator= (const Perspective_camera &pc) |
| |
| virtual void | swap (Perspective_camera &other) |
| |
| virtual | ~Perspective_camera () |
| |
| virtual void | read (std::istream &in) |
| | Reads this camera from an input stream. More...
|
| |
| virtual void | read (const char *fname) |
| | Reads this camera from a file. More...
|
| |
| virtual void | write (std::ostream &out) const |
| | Writes this camera to an output stream. More...
|
| |
| virtual void | write (const char *fname) const |
| | Writes this camera to an output stream. More...
|
| |
| virtual void | update_rendering_interface () const |
| | This funcation makes sure that the rendering interface is consistent with the camera parameters stored in this class. More...
|
| |
| double | get_near () const |
| | get near plane z-distance from camera center (always positive) More...
|
| |
| void | set_near (double near) |
| |
| double | get_far () const |
| | get farplane z-distance from camera center (always positive) More...
|
| |
| void | set_far (double far) |
| |
| Vector | get_world_origin () const |
| | returns the world origin in camera coordinates More...
|
| |
| const kjb::Vector & | get_camera_centre () const |
| | returns the camera centre More...
|
| |
| double | get_camera_centre_x () const |
| | returns the x-coordinate of the camera centre More...
|
| |
| double | get_camera_centre_y () const |
| | returns the y-coordinate of the camera centre More...
|
| |
| double | get_camera_centre_z () const |
| | returns the y-coordinate of the camera centre More...
|
| |
| double | get_pitch () const |
| | returns the pitch angle in radian More...
|
| |
| double | get_yaw () const |
| | returns the yaw angle in radian More...
|
| |
| double | get_roll () const |
| | returns the roll angle in radian More...
|
| |
| const Vector & | get_rotation_angles () const |
| | returns the rotation angles [pitch, yaw, roll] More...
|
| |
| double | get_focal_length () const |
| | returns the focal length More...
|
| |
| const kjb::Vector & | get_principal_point () const |
| | returns the principal point More...
|
| |
| double | get_principal_point (unsigned int index) const |
| | returns the coordinate of the principal point specified by the input index More...
|
| |
| double | get_principal_point_x () const |
| | returns the x-coordinate of the principal point More...
|
| |
| double | get_principal_point_y () const |
| | returns the y-coordinate of the principal point More...
|
| |
| double | get_skew () const |
| | returns the skew in radian More...
|
| |
| double | get_aspect_ratio () const |
| | returns the aspect ratio More...
|
| |
| double | get_world_scale () const |
| | returns the world scale More...
|
| |
| void | set_world_origin (const kjb::Vector &origin) |
| | This returns a 3X4 camera matrix, built from the intrinsic and extrinsic parameters. More...
|
| |
| virtual void | set_camera_centre (const kjb::Vector &icentre) |
| | sets the camera centre More...
|
| |
| virtual void | set_camera_centre (unsigned int index, double ivalue) |
| | sets the coordinate of the camera centre specified by the input index More...
|
| |
| virtual void | set_camera_centre_x (double ix) |
| | sets the x-coordinate of the camera centre More...
|
| |
| virtual void | set_camera_centre_y (double iy) |
| | sets the y-coordinate of the camera centre More...
|
| |
| virtual void | set_camera_centre_z (double iz) |
| | sets the y-coordinate of the camera centre More...
|
| |
| virtual void | set_pitch (double ipitch) |
| | sets the pitch angle in radian More...
|
| |
| virtual void | set_yaw (double iyaw) |
| | sets the yaw angle in radian More...
|
| |
| virtual void | set_roll (double iroll) |
| | sets the roll angle in radian More...
|
| |
| virtual void | rotate_around_x_axis (double theta) |
| | rotates the camera around its x-axis More...
|
| |
| virtual void | rotate_around_y_axis (double theta) |
| | rotates the camera around its x-axis More...
|
| |
| virtual void | rotate_around_z_axis (double theta) |
| | rotates the camera around its x-axis More...
|
| |
| virtual void | rotate_around_camera_axes (double thetax, double thetay, double thetaz) |
| | rotates the camera around its x,y,z axes in this order More...
|
| |
| virtual void | set_rotation_angles (double ipitch, double iyaw, double iroll) |
| | sets pitch, yaw and roll for this camera, in radian More...
|
| |
| virtual void | set_focal_length (double ifocal) |
| | sets the focal length More...
|
| |
| virtual void | update_focal_with_scale (double ifocal) |
| |
| virtual void | set_principal_point (const kjb::Vector &ip) |
| | sets the principal point More...
|
| |
| virtual void | set_principal_point (unsigned int index, double ip) |
| | sets the coordinate of the principal point specified by the input index More...
|
| |
| virtual void | set_principal_point_x (double ix) |
| | sets the x-coordinate of the principal point More...
|
| |
| virtual void | set_principal_point_y (double iy) |
| | sets the y-coordinate of the principal point More...
|
| |
| virtual void | set_skew (double is) |
| | sets the skew angle More...
|
| |
| virtual void | set_aspect_ratio (double iar) |
| | sets the aspect ratio More...
|
| |
| virtual void | set_world_scale (double iscale) |
| | sets the world scale More...
|
| |
| virtual void | set_look_at (double deyex, double deyey, double deyez, double dlookx, double dlooky, double dlookz, double dupx, double dupy, double dupz) |
| | sets the position and orientation with the semantics similar to gluLookAt More...
|
| |
| virtual void | set_look_at (const kjb::Vector &eye, const kjb::Vector &look, const kjb::Vector &up) |
| | sets the position and orientation with the semantics similar to gluLookAt in a more convenient form More...
|
| |
| virtual void | translate (double dx, double dy, double dz, unsigned int frame=FRAME_CAMERA_WORLD_COORDINATES) |
| |
| virtual void | prepare_for_rendering (bool clean_buffers) const |
| |
| const Matrix & | get_modelview_matrix () const |
| |
| const Matrix & | get_projection_matrix () const |
| |
| Matrix | get_gl_projection_matrix () const |
| |
| void | mult_projection_matrix () const |
| |
| void | mult_modelview_matrix () const |
| |
virtual
Parametric_camera_gl_interface & | get_rendering_interface () const |
| |
| void | set_rotation_mode (kjb::Quaternion::Euler_mode imode) |
| |
| virtual void | set_angles_from_quaternion (const kjb::Quaternion &q) |
| | sets the rotation angles from an input quaternion More...
|
| |
| const kjb::Quaternion & | get_rotations_as_a_quaternion () const |
| | returns the rotations of this camera as a quaternion More...
|
| |
| const kjb::Quaternion & | get_orientation () const |
| | Alias of get_angles_as_a_quaternion() More...
|
| |
| void | rotate_point_to_camera_frame (kjb::Vector &ipoint) |
| | Rotates the input point into the camera coordinate system. More...
|
| |
| void | get_point_in_world_coordinates (const kjb::Vector &point_in_camera_coordinates, kjb::Vector &point_in_world_coordinates) const |
| | Given a point in camera coordinates, it converts it to world coordinates. More...
|
| |
| bool | is_point_in_camera_frustum (const kjb::Vector &point_in_world_coordinates, double &x_, double &y_, unsigned int num_image_rows, unsigned int num_image_cols) const |
| | Given a point in world coordinates, it returns true if the point is in the viewing frustum, false otherwise. Notice that the OpenGL context will be set in this function, since it is needed for the computation. More...
|
| |
| void | get_point_in_camera_coordinates (kjb::Vector &io_point) const |
| | Given a point in world coordinates, it converts it to camera coordinates. More...
|
| |
| void | compute_new_euler_angles_on_rotations (double dpitch, double dyaw, double droll) |
| |
| const Matrix & | get_camera_matrix () const |
| |
| const Matrix & | build_camera_matrix () const |
| |
| Vector | to_camera_coordinates (const Vector &v) const |
| |
| virtual | ~Cloneable () |
| | Deletes this Cloneable. More...
|
| |
| virtual | ~Readable () |
| | Deletes this Readable. More...
|
| |
| virtual | ~Writeable () |
| | Deletes this Writeable. More...
|
| |
A perspective camera whose parameters are defined by a camera calibration matrix.
- Author
- Kyle Simek


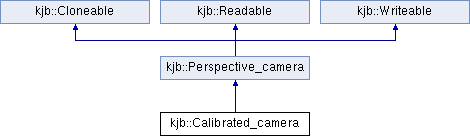
 Public Member Functions inherited from kjb::Perspective_camera
Public Member Functions inherited from kjb::Perspective_camera 1.8.6
1.8.6