http://www.cs.sfu.ca/~colour/data/index.htmllocated on this server, as the location is more permanent.
http://www.cs.sfu.ca/~colour/data/objects_under_different_lights/index.html
Questions, comments, and problems with this data should be directed to Kobus Barnard
This directory contains some the data presented in:
Kobus Barnard, Lindsay Martin, Brian Funt, and Adam Coath, " Data for Colour Research," In preparation.
(This is the appropriate archival reference for the data.)
This directory contains the data used for:
Kobus Barnard, Brian Funt, and Lindsay Martin, " Color Constancy Meets Color Indexing," in preparation.
Chapter 11 of Kobus Barnard, "Practical Colour Constancy," Phd thesis, Simon Fraser University, School of Computing (1999)
The data was collected by Lindsay Martin under the guidance of Kobus Barnard in Brian Funt's Computational Colour Vision Laboratory.
You may also be interested in our preliminary data.
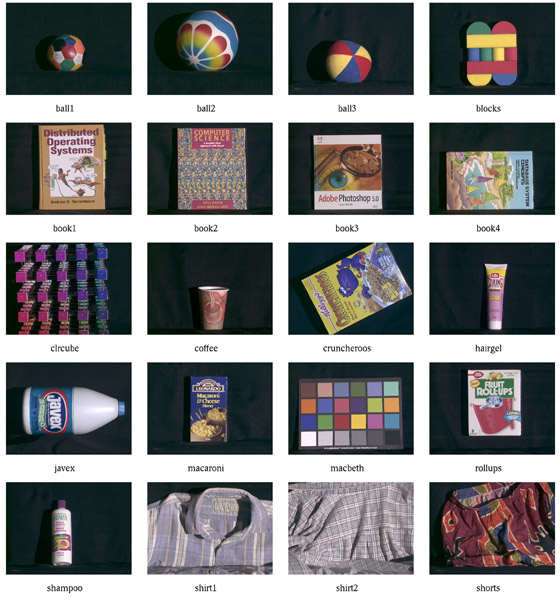
Our methodology for the data capture is exactly the same as used for the colour constancy test images, including the 11 illuminants used, and all preprocessing. The data format is also the same as described there. The differences are as follows. First, all scenes are of objects on a dark background, in order to make the data appropriate for certain types of experiments. Second, the pose of the object was changed every time the illuminant was changed.
Note that the setup is similar to, but slightly different from our preliminary experiment. In the preliminary experiment, we took a set of images under each of 5 lights without moving the object, and then a second series of images where the object was moved. In this set, we chose to simplify the experiment by not using registered images, but this meant that error metrics based on mappings between images could not be used. These error metrics were more justified using the 5 illuminants chosen for that experiment, but in general, using mapping between images as a metric is delicate because the geometry can only be maintained exactly using filters over one (or physically very similar) source. In the first experiment this criteria was essentially met for 4 out of 5 illuminants, but in the second, it would have been approximately true for only 8 out of 11 illuminants. Given the time trade of between a registered set, and more illuminant/scene combinations, we chose to drop the mapping based metrics.
A montage of all the objects under one illuminant.
(This is actually Figure 11.1 of
Kobus Barnard 's thesis.
)
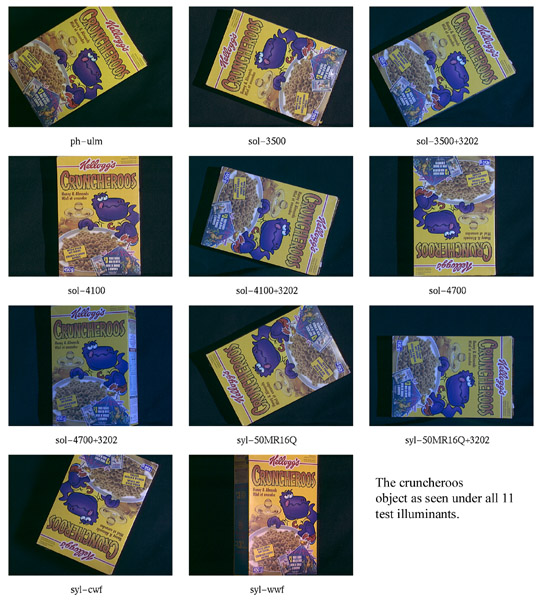
A montage of one of the scenes under all illuminants.
(This is actually Figure 11.2 of
Kobus Barnard 's thesis.
)
All the images (8 bit tiffs)
All the images (16 bit tiffs)
{kind=link}
{kind=link}